Inovance Robot Project Generator
Based on R24.C4
Based on R24.C4
영문, 숫자, 언더바(_)만 사용 가능합니다. 최대 16자.
생성할 로봇 모델을 선택해주세요.
Tray: 바닥면에 진공 패드가 없이 일반적인 적재/취출 공정
Stage: 자재를 적재/취출 시 바닥면에 진공 패드가 있는 공정
MCR: 바코드/QR코드 등 고정형 스캐너로 이동하는 공정
Vision: 비전로 이동하거나 보정하는 공정
Trash: 박리 후 필름을 버리는 박리 전용 공정
Get: 부품을 잡는(Picking) 흡착/그립 동작
Put: 부품을 내려놓는(Placing) 동작
Check: 센서/비전을 통한 유무 및 상태 판독
Calibration: 비전 9-Point 교정 전용 동작
Peeling: 자재 필름 제거(박리) 특수 궤적 작업
Vacuum: Tool이 진공 흡착 패드인 경우
Gripper: Tool이 기구형 그리퍼인 경우
PLC (IO): Vision 보정 시에만 활성화되며, Vision - PLC - Robot 방식(Comm IO)을 사용할 경우
Vision (Socket): Vision 보정 시에만 활성화되며, Vision - Robot 방식(Socket)을 사용할 경우
No use: 비전 보정 데이터를 사용하지 않음
Use - IO: PLC 통신 IO(2Word)를 통해 보정 데이터 수신
Use - Socket: TCP/IP Socket 직접 통신으로 보정 데이터 수신
상위 제어기(PLC)에서 로봇 프로그램을 시작하는 신호 순서입니다.
정지 신호를 수신하면 로봇은 즉시 동작을 중지하고 정지 상태로 전환됩니다.
로봇 이상 발생 시 알람 신호와 알람 코드가 출력됩니다. 조치 후 리셋 신호로 해제합니다.
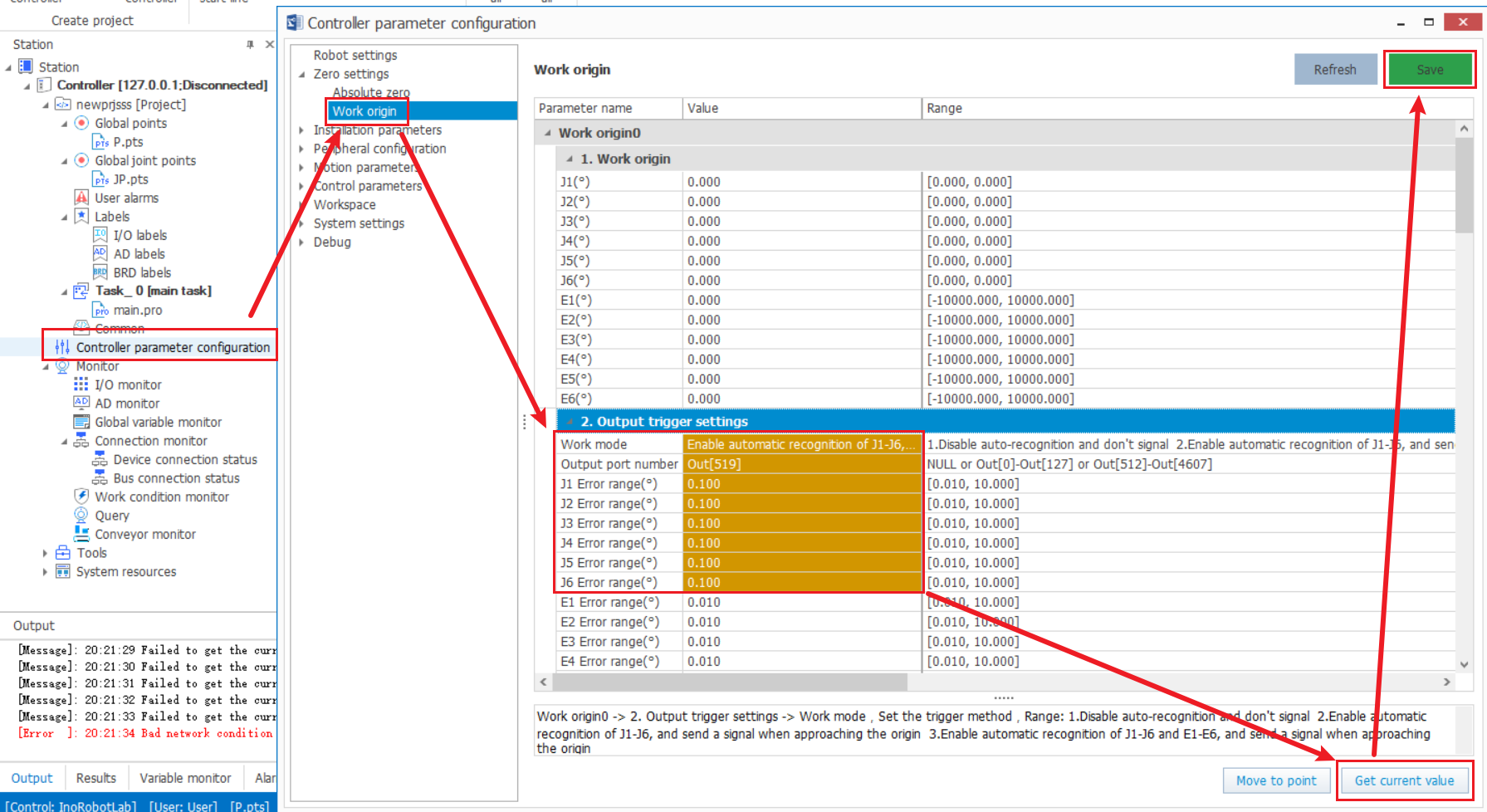
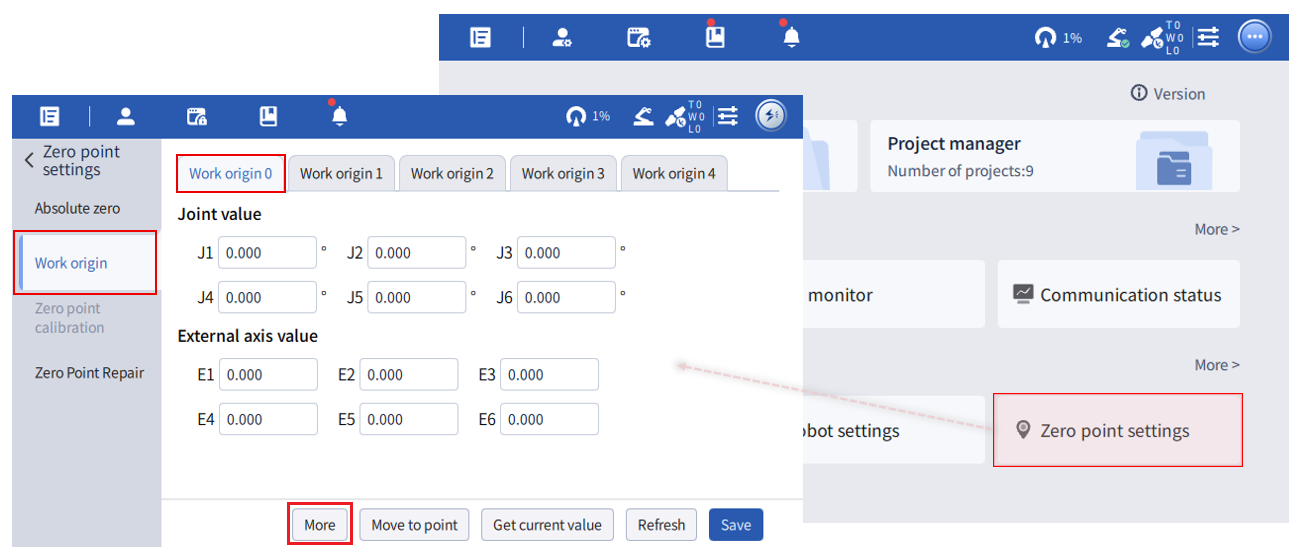
호밍 신호 수신 시 로봇이 원점으로 복귀합니다. 완료 후 home_sts가 ON됩니다.
대기 위치 이동 신호입니다. Pn = 프로세스 번호.
작업 위치 이동 신호입니다. 작업 완료 후 완료 신호를 출력합니다.
Work 위치로 이동 후 Offset을 변경하여 로봇 위치를 수정된 위치로 이동 및 저장하여 로봇의 위치를 수정합니다.
Work 위치 도달 후 로봇은 툴 제어 신호를 요청하면 PLC는 솔레노이드를 제어하고 센서 입력을 로봇에게 출력하여 완료 신호를 출력합니다.