Tool 부하 조건에 따른 모델 적합성 판정
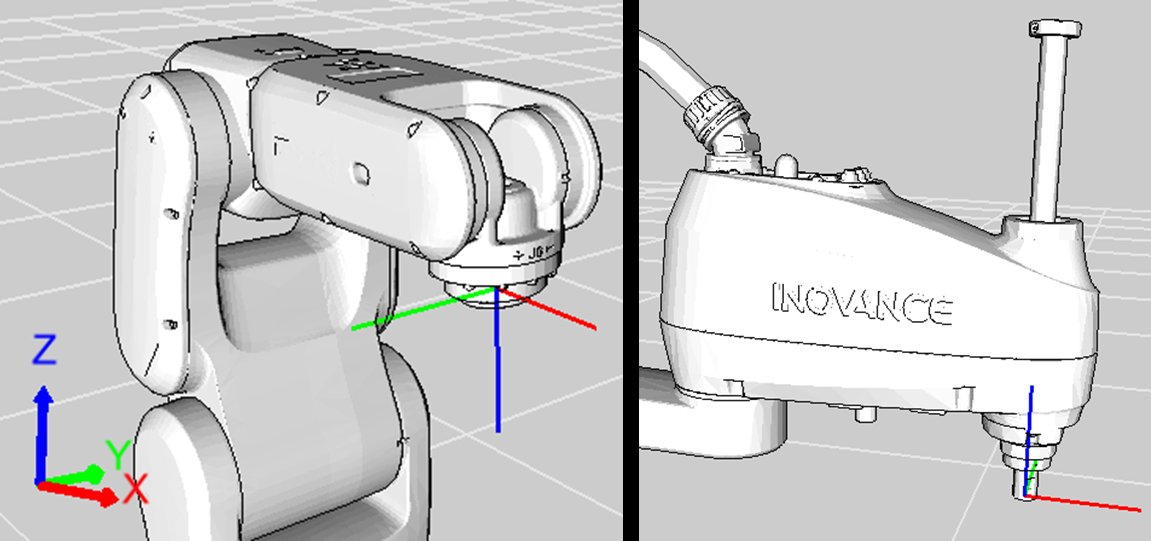
Tool 좌표계는 끝단 플랜지 중심을 원점으로 하며, 축 방향은 로봇 J6(끝단) 좌표계를 따릅니다. 빨강=X, 초록=Y, 파랑=Z. 모든 좌표값은 이 기준으로 입력하세요.
X·Y·Z 치수는 Tool 좌표계 방향(빨강=X, 초록=Y, 파랑=Z)을 기준으로 입력합니다. Tool 전체를 여러 직육면체 블록으로 분할해 각 블록의 무게와 치수를 입력하세요.
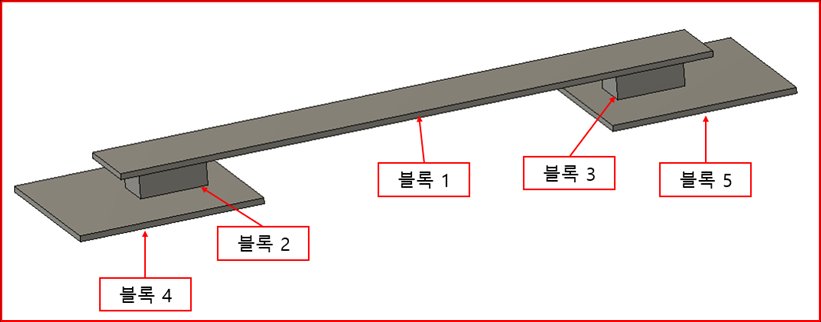
각 블록의 X·Y·Z 치수는 Tool 좌표계 방향(빨강=X, 초록=Y, 파랑=Z)을 기준으로 입력합니다. Tool 전체를 여러 개의 직육면체 블록으로 분할해 각 블록의 재질과 치수를 입력하세요.
각 블록 무게중심의 위치를 끝단 플랜지 원점으로부터의 거리(mm)로 Tool 좌표계 기준 입력합니다. 빨강=X, 초록=Y, 파랑=Z. 끝단 바깥쪽(+)·안쪽(−) 부호를 유지하세요.
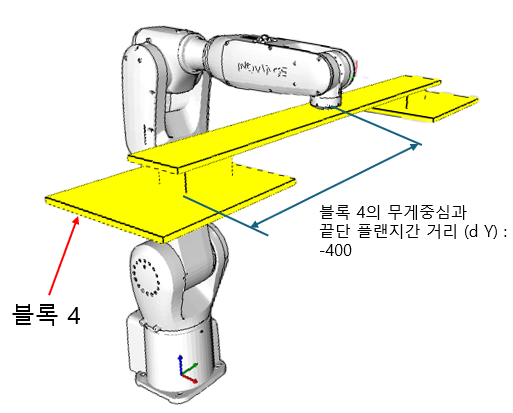
블록 무게중심 위치 참조용 도면